The Postcard Pathtracer, Part 3: Of Boxes, Lines & Rays
2020-12-13 995 words 15 mins read
Contents
Coming out of Post 2 we have gained a decent understanding of how the shape of the PIXAR letters is constructed. But there’s still a lot of ground left to cover, and for some unfathomable reason I’m still sorta committed to keep this deep-dive going.
In the previous two posts of this series I’ve been chipping away at a cleaned up version of the Vec class and the QueryDatabase function, trying to make sense of what even the smallest calculation/computation does.
— BoxTester class —
Before we wrap up what’s left of QueryDistance, let’s take a look at the BoxTest function again:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
// Rectangle CSG equation. Returns minimum signed distance from
// space carved by lowerLeft vertex and opposite corner vertex upperRight.
floatBoxTest(Vector3position,Vector3lowerLeft,Vector3upperRight){Vector3toLowerLeft=position-lowerLeft;Vector3toUpperRight=upperRight-position;return-std::min(// <- minimum distance out of all, i.e. to closest wall of the box
std::min(// <- minimum distance on x- OR y-axis
std::min(toLowerLeft.x_,toUpperRight.x_),// <- minimum distance on x-axis
std::min(toLowerLeft.y_,toUpperRight.y_)// <- minimum distance on y-axis
),std::min(toLowerLeft.z_,toUpperRight.z_)// <- minimum distance on z-axis
);}
The function takes three arguments: The position being tested and the lowerLeft & upperRight corners of the box we’re testing against. In a moment we’ll see multiple calls to BoxTest within the same line of code and it looks rather cluttered. So my idea here was to turn the BoxTest into a class that holds its defining vectors and does the same test:
classBoxTester{public:Vector3start;Vector3end;BoxTester(Vector3b,Vector3e):start(b),end(e){}floatTest(Vector3&position){Vector3toLowerLeft=position-start;Vector3toUpperRight=end-position;return-std::min(// <- minimum distance out of all, i.e. to closest wall of the box
std::min(// <- minimum distance on x- OR y-axis
std::min(toLowerLeft.x_,toUpperRight.x_),// <- minimum distance on x-axis
std::min(toLowerLeft.y_,toUpperRight.y_)// <- minimum distance on y-axis
),std::min(toLowerLeft.z_,toUpperRight.z_)// <- minimum distance on z-axis
);}};
In hindsight this might be one of those “You Ain’t Gonna Need It” things, since we’re currently not checking any box more than once… but it’s a fairly quick and painless change, so let’s roll with it.
Wrapping up QueryDistance
With the new class at our disposal we can return to the rest of QueryDistance. At the end of the last post we got all the distance checks against the letters covered.
floatroomDist;roomDist=std::min(// min(A,B) = Union with Constructive solid geometry
//-min carves an empty space
-std::min(// Lower room
BoxTest(position,Vector3(-30,-.5,-30),Vector3(30,18,30)),// Upper room
BoxTest(position,Vector3(-25,17,-25),Vector3(25,20,25))),BoxTest(// Ceiling "planks" spaced 8 units apart.
Vector3(fmodf(fabsf(position.x_),8),position.y_,position.z_),Vector3(1.5,18.5,-25),Vector3(6.5,20,25)));if(roomDist<distance)distance=roomDist,hitType=HIT_WALL;floatsun=19.9-position.y_;// Everything above 19.9 is light source.
if(sun<distance)distance=sun,hitType=HIT_SUN;
The last two lines are pretty straight-forward — anything above a certain position hits the sun or light source of the scene.
But before that there are the distance checks for the entire room boiled down into essentially a single line. To break that up I created a few BoxTesters:
1
2
3
4
5
6
// Lower room (the room itself)
BoxTesterbox_room(Vector3(-30,-.5,-30),Vector3(30,18,30));// Upper room (The space where the ceiling planks are)
BoxTesterbox_roof(Vector3(-25,17,-25),Vector3(25,20,25));// Ceiling "planks", or one of them. Actual tested position will be modulo'd along an axis.
BoxTesterbox_planks(Vector3(1.5,18.5,-25),Vector3(6.5,20,25));
The main room box_room has a footprint of 60 by 60 units centered around 0,0 and is roughly 18 units tall. Inset into the ceiling is another space box_roof that spans from height 17 to 20. As seen in the snippet before anything above y-position 19.9 is our light source already though, allowing light in through this space in the ceiling.
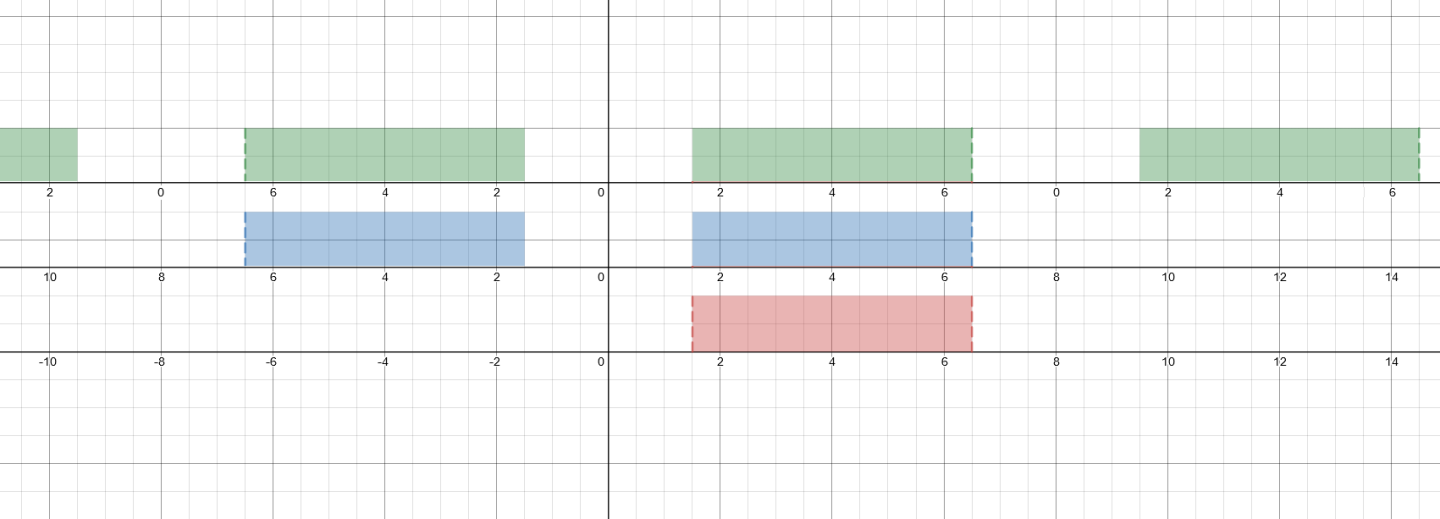
And lastly our third box box_planks sits at height 18.5 to 20 in the ceiling space. It spans the entire space on the z-Axis from -25 to 25, and sits at 1.5 to 6.5 on the x-Axis, near the center. The fact that it is on the positive side of the x-Axis is an intentional choice too, as we’re about to discover.
1
2
3
4
5
6
7
8
9
10
11
Vector3plank_test_pos(position);plank_test_pos.x_=fmodf(fabsf(plank_test_pos.x_),8.0f);floatroomDist=std::min(// min(A,B) = Union with Constructive solid geometry
//-min carves an empty space
-std::min(box_room.Test(position),// Lower room
box_roof.Test(position)// Upper room
),box_planks.Test(plank_test_pos)// Ceiling "planks" spaced 8 units apart.
);
Now, with all the Vector objects tucked away in the BoxTester instance, this all looks a lot cleaner. What’s going on here exactly?
Right in the middle there’s the Test() calls against the main two boxes, which as a reminder return a positive distance for anything outside of the box and a negative one for anything inside. As with most of our distance checks we’re only interested in finding the closest of these geometry objects, so we take the smaller out of the two. Then we negate the result, which reverses what’s considered solid/empty space: The space inside the boxes is empty now, returning positive distances towards the nearest wall. And lastly we take another minimum in comparison to the box_planks check, this one being a regular non-inverted box.
But hold on, we are using the Vector3 plank_test_pos on the last check! This is the same as our position-to-query that we’ve used throughout this function, but with a twist or two:
On the x-Axis component we take the absolute value (fabsf), meaning anything between -6.5 < x < -1.5 within the right location will also be considered to be “inside” the plank!
And secondly, we’re taking the modulo (fmodf) of the position with 8.0f — so after every “segment” of 8 units along the x-Axis we loop back to checking at 0.0f: Just as there’s a box at 1.5 - 6.5 there’ll be a box at 9.5 - 14.5 and 17.5 - 22.5.1
So that use of fmodf and fabsf is a clever way of constructing some repeating geometry to make the scene more interesting.
I felt like adding an illustration to drive the point home. Made at desmos.com/calculator
All changes mentioned so far, which is mostly the introduction of the BoxTester class, are in this commit.
— New Class: LetterLine —
Next I decided that I still found the vector math we looked at in the last post to be rather unwieldy. Especially things like line_vector.Normalized() and having separate helper variables for line_begin, line_end & line_vector irked me.
Looking back at it now, I realize that this isn’t exactly ideal. We have all those vectors in our line, but they’re public since I wanted to keep it simple… but they aren’t meant to be altered after creating an instance of this class, since that won’t update the direction, normal and length properties.
I really just wanted objects with no logic to them, to just use them as containers for some useful properties of our lines. I also hoped calculating the extra two vectors and the length up-front would speed up the overall pathtracing, but I didn’t actually check if it makes any noticeable difference. /shrug
Here’s the new function to create LetterLine instances from our pixar_points array:
Now the fun part comes when we actually make use of these new “container objects”. For comparison, here’s the previous
version of our code that we’ve been working with:
floatQueryDatabase(Vector3position,int&hitType){//[...]
for(inti=0;i+3<pixar_points.size();i+=4){Vector2line_begin=Vector2(pixar_points[i],pixar_points[i+1]);Vector2line_end=Vector2(pixar_points[i+2],pixar_points[i+3]);Vector2line_vector=line_end-line_begin;// factor to scale line_vector by to project position onto line
// i.e. with this factor alone (line_begin + line_vector.Normalized() * scale_factor)
// gives us the closest point on an infinite line
floatscale_factor=Vector2(pos_in_z0-line_begin).DotProduct(line_vector.Normalized());// But now we clamp the scaling within 0.0f <= scale_factor <= line length
scale_factor=std::min(std::max(scale_factor,0.0f),line_vector.Length());Vector2letter_distance=pos_in_z0-(line_begin+line_vector.Normalized()*scale_factor);distance=std::min(distance,letter_distance.Length());// compare distance.
}//[...]
}
// Sample the world using Signed Distance Fields.
floatQueryDatabase(Vector3position,int&hitType){//[...]
for(LetterLineline:letterlines){// factor to scale line.normal by to project position onto line
// i.e. with this factor alone (line.start + line.normal * scale_factor)
// gives us the closest point on an infinite line
floatscale_factor=Vector2(pos_in_z0-line.start).DotProduct(line.normal);// But now we clamp the scaling within 0.0f <= scale_factor <= line length
scale_factor=std::min(std::max(scale_factor,0.0f),line.length);Vector2letter_distance=pos_in_z0-(line.start+line.normal*scale_factor);distance=std::min(distance,letter_distance.Length());// compare distance.
}//[...]
}
Just four lines of code within the loop, using two or three mathematical operators and variables each! Can’t get much simpler than this, if you ask me.
The corresponding commit is here, which includes the next section’s tiny set of changes.
— misc. changes —
std::vector of curves
Not far from our last change there’s also these:
1
2
3
4
5
6
7
8
// Two curves (for P and R in PixaR) with hard-coded locations.
Vector2curves[]={Vector2(-11,6),Vector2(11,6)};for(inti=2;i--;){Vector2center_to_pos=pos_in_z0-curves[i];//[...]
}
While I was at it I decided to pull the curve vectors out of the function to make them easier to access/edit near the top. They got a new shiny std::vector as their home as well, which allows us to switch to a range-based for loop:
1
2
3
4
5
6
// Two curves (for P and R in PixaR) with hard-coded locations.
// curve centers are between right ends of the bars.
std::vector<Vector2>curve_centers={Vector2(-11,6),Vector2(11,6)};
// OLD
Vector3lightDirection(.6,.6,1);// Directional light
1
2
// NEW
Vector3lightDirection(light_direction);// Directional light
…
1
2
3
// OLD
Vector3position(-22,5,25);Vector3goal=Vector3(-3,4,0)-position;
1
2
3
// NEW
Vector3position(camera_position);Vector3goal=lookat_position-position;
Not much to add here, other than to wonder why I decided to use copy-constructors to make the local variables still. None of the three get modified anywhere other than the light direction getting normalized just to be safe.
Finally it’s time to tackle the next function: RayMarching. Just to recall, this function performs the signed sphere marching or distance-aided ray marching. Again, other posts like the original one by Fabien explain the concept very well. In short: We’re casting a ray, and want to see what it hits and where. This is done by starting at the origin of the ray, following these steps:
Get distance to closest object via QueryDatabase (also updates hitType since it’s a reference parameter!)
Move forward by this distance, since the sphere of this radius is guaranteed to be empty
Repeat for a finite amount of steps and distance
There’s not much more to it than that and the implementation we’re working with is pretty compact:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
// Perform signed sphere marching
// Returns hitType 0, 1, 2, or 3 and update hit position/normal
intRayMarching(Vector3origin,Vector3direction,Vector3&hitPos,Vector3&hitNorm){inthitType=HIT_NONE;intnoHitCount=0;floatd;// distance from closest object in world.
for(floattotal_d=0;total_d<100;total_d+=d)if((d=QueryDatabase(hitPos=origin+direction*total_d,hitType))<.01||++noHitCount>99)returnhitNorm=Vector3(QueryDatabase(hitPos+Vector3(.01,0,0),noHitCount)-d,QueryDatabase(hitPos+Vector3(0,.01,0),noHitCount)-d,QueryDatabase(hitPos+Vector3(0,0,.01),noHitCount)-d).Normalized(),hitType;// Weird return statement where a variable is also updated.
return0;}
Unfortunately (for readability at least!) there’s a lot going on with variables being modified in the if-condition and that big assignment to hitNorm within the return statement with the use of the comma operator (which we’ve come across in Part 2’s chapter on the curves)
These changes are not all that extensive however, so let’s look at the rewritten function:
// Perform signed sphere marching
// Returns hitType 0, 1, 2, or 3 and update hit position/normal
intRayMarching(Vector3origin,Vector3direction,Vector3&hitPos,Vector3&hitNorm){inthitType=HIT_NONE;intnoHitCount=0;floatd;// distance from closest object in world.
// Signed distance marching
for(floattotal_d=0;total_d<100;total_d+=d){hitPos=origin+direction*total_d;d=QueryDatabase(hitPos,hitType);// negative distance will mean we're inside the object we hit, I guess
// and we'll return right away so no worries there
if(d<.01||noHitCount>99){intunusedReturnRef=0;hitNorm=Vector3(QueryDatabase(hitPos+Vector3(.01,0,0),unusedReturnRef)-d,QueryDatabase(hitPos+Vector3(0,.01,0),unusedReturnRef)-d,QueryDatabase(hitPos+Vector3(0,0,.01),unusedReturnRef)-d).Normalized();returnhitType;}++noHitCount;}return0;}
Assigning to d now happens in line 11 above, before the if-statement. I added in a comment to remind myself why we’re only seemingly checking against the small positive distance of 0.1, but if d is a negative number that means we’re inside an object and should definitely return from the function as well.
The intnoHitCount is used to count how many iterations we’ve gone through, and I moved the increment operator used on that back towards the end of the loop, instead of doing it right within the comparison. In principle we could also use noHitCount as our for-loop iteration variable, and then the total_d += d would be inside the loop and total_d >= 100 would be within the if statement.
Technically we do something slightly different depending on whether we step into the if statement and return, or finish the for loop and return.
within the if statement we calculate hitNorm (more on that coming up) and return hitType
after the for loop we simply return which happens to be HIT_NONE. The reference hitNorm is still unchanged from what was passed in
Does this difference matter? …It might. But these are edge cases: We hit total_d >= 100 when our ray has traveled a long way without hitting anything — and this is a ray that is not being reflected anywhere yet, its direction never changes. Which leads me to believe this might be impossible within our current scene. If we did have a ray this long, it’d return HIT_NONE, which as we’ll see ends the traced path in Trace().
In the other case of noHitCount > 99 we actually return as if we’d hit something, and hitType will invariably have been set by QueryDistance — looking back through that it cannot possibly be HIT_NONE anymore! We will be returning the normal vector towards, and type of, the closest thing in our scene. Which will continue the traced ray.
This case of noHitCount reaching 100 is actually fairly common, and is an area where a lot of computation is spent: Imagine our ray is passing by a surface really closely but still outside of the d < .01. Since we’re already close to the surface, our sphere is as small as d is and we’ll be inching closer and closer to the surface at an ever decreasing step size.
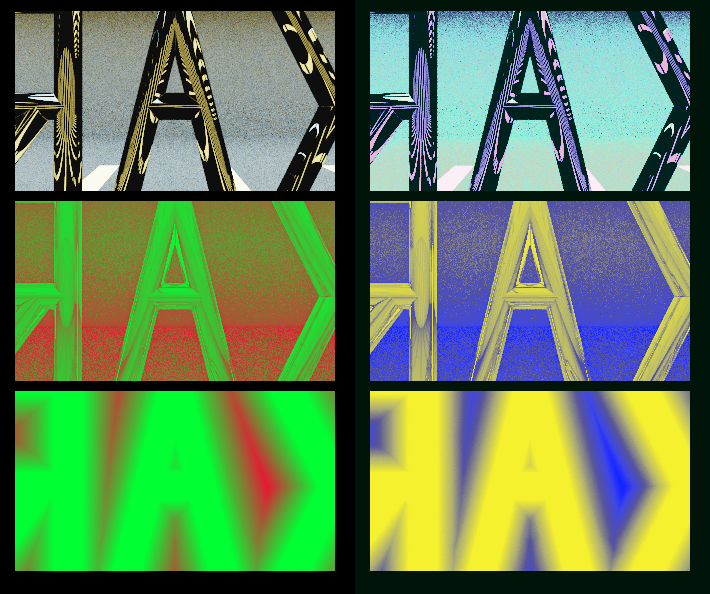
I’ve tried visualizing this at some point, although I have to admit I don’t fully remember if this is the original code or if I already attempted to optimize the edge cases in any way.
I realized the red/green color mapping wasn’t great for color-blind readers. These were just to get a rough visual idea.
If I recall correctly the middle image is a mapping of the biggest number of iterations (=noHitCount) that occured on that pixel, even across reflections, while the bottom image is a map of the max num of iterations on the first ray sent into the scene?…
But in any case it makes sense to return something useable if we exceed our maximum iterations before exceeding maximum distance, since this most likely means we’ve been approaching a surface. If we’ve traveled a long total distance and “not much happened” we can’t really be sure there’s anything around anywhere.
A cursory check with a log statement before the return 0 just now contributed no output, so that last return statement really doesn’t get hit in our current setup. If I reduce the maximum ray distance from 100 down to 40 I get something like this:
With rays limited to length < 40, scene turns black past that distance.
…and a 136 MB log file because of course I forgot to take out the debug logging statement… Whoops!
I’ve gone off on a bit of a tangent there, but there’s one thing I still wanted to highlight within the RayMarching function: Calculating the normal vector to the hit.
First off, QueryDatabase still takes that second parameter to hand back a hitType — which is why I added the variable unusedReturnRef just to signal that we don’t care about that value here at all. In the original code noHitCount was passed in by reference here, simply because that variable was available and not needed anymore either.
Second of all, QueryDatabase only returns a distance value for a coordinate, not a direction. That’s why we need to query three times with an offset per axis to calculate a normal vector. The reason why this works has kinda thrown my brain for a loop for a while, but the easiest analogy I can think of is a finite distance approximation of the slope of a 2d graph/function. And what we have in our case is a multi-variable function. We could also think of it as getting the gradient of a vector field, or the gradient of an isosurface within that… but right now I’m not even sure I’m using these terms correctly anymore.
Honestly I was digging through some interesting math-related Wikipedia entries because I also wondered how inaccurate this method is, how taking more samples or sampling at different distances would affect it, and so on. But that could use another post to dig into at some later date, since I got these current ones to finish.
All that aside, with the final commit for today we have today’s final code base ironed out.
— Interim result —
And once again for completeness' sake, here’s the entire body of code we got so far, minus the Urho3D scaffolding:
floatrandomVal(){return(float)rand()/RAND_MAX;}// Box CSG equation. Returns minimum signed distance from space
// carved by start vector and opposite corner vector end.
classBoxTester{public:Vector3start;Vector3end;BoxTester(Vector3b,Vector3e):start(b),end(e){}floatTest(Vector3&position){Vector3toLowerLeft=position-start;Vector3toUpperRight=end-position;return-std::min(// <- minimum distance out of all, i.e. to closest wall of the box
std::min(// <- minimum distance on x- OR y-axis
std::min(toLowerLeft.x_,toUpperRight.x_),// <- minimum distance on x-axis
std::min(toLowerLeft.y_,toUpperRight.y_)// <- minimum distance on y-axis
),std::min(toLowerLeft.z_,toUpperRight.z_)// <- minimum distance on z-axis
);}};// Lower room (the room itself)
BoxTesterbox_room(Vector3(-30,-.5,-30),Vector3(30,18,30));// Upper room (The space where the ceiling planks are)
BoxTesterbox_roof(Vector3(-25,17,-25),Vector3(25,20,25));// Ceiling "planks", or one of them. Actual tested position will be modulo'd along an axis.
BoxTesterbox_planks(Vector3(1.5,18.5,-25),Vector3(6.5,20,25));#define HIT_NONE 0
#define HIT_LETTER 1
#define HIT_WALL 2
#define HIT_SUN 3
classLetterLine{public:Vector2start;Vector2end;Vector2direction;Vector2normal;floatlength;LetterLine(Vector2&b,Vector2&e):start(b),end(e){direction=e-b;normal=direction.Normalized();length=direction.Length();}};std::vector<int>pixar_points={-13,0,-13,8,// P stem
-13,4,-11,4,// P top bar
-13,8,-11,8,// P mid bar
-7,0,-5,0,// I bottom bar
-6,0,-6,8,// I stem
-7,8,-5,8,// I top bar
-3,0,1,8,// X slash
-3,8,1,0,// X backslash
3,0,5,8,// A slash
5,8,7,0,// A backslash
4,4,6,4,// A bar
9,0,9,8,// R stem
9,4,11,4,// R mid bar
9,8,11,8,// R top bar
10,4,13,0// R leg
};std::vector<LetterLine>letterlines={};// Two curves (for P and R in PixaR) with hard-coded locations.
// curve centers are between right ends of the bars.
std::vector<Vector2>curve_centers={Vector2(-11,6),Vector2(11,6)};Vector3camera_position=Vector3(-22,5,25);Vector3lookat_position=Vector3(-3,4,0);Vector3light_direction=Vector3(.6,.6,1);voidSetupPathtracer(){for(inti=0;i+3<pixar_points.size();i+=4){// letters.Length()
//Vector3 begin = Vector3(letters.At(i) - 79, letters.At(i+1) - 79);
//Vector3 end = Vector3(letters.At(i+2) - 79, letters.At(i+3) - 79);
Vector2b=Vector2(pixar_points[i],pixar_points[i+1]);Vector2e=Vector2(pixar_points[i+2],pixar_points[i+3]);LetterLine*l=newLetterLine(b,e);letterlines.push_back(*l);}}// Sample the world using Signed Distance Fields.
floatQueryDatabase(Vector3position,int&hitType){floatdistance=1e9;Vector2pos_in_z0(position.x_,position.y_);// Flattened position (z=0)
for(LetterLineline:letterlines){// factor to scale line.normal by to project position onto line
// i.e. with this factor alone (line.start + line.normal * scale_factor)
// gives us the closest point on an infinite line
floatscale_factor=Vector2(pos_in_z0-line.start).DotProduct(line.normal);// But now we clamp the scaling within 0.0f <= scale_factor <= line length
scale_factor=std::min(std::max(scale_factor,0.0f),line.length);Vector2letter_distance=pos_in_z0-(line.start+line.normal*scale_factor);distance=std::min(distance,letter_distance.Length());// compare distance.
}for(Vector2c:curve_centers){Vector2center_to_pos=pos_in_z0-c;if(center_to_pos.x_>0){floatcomparison_dist=std::abs(center_to_pos.Length()-2.0f);distance=std::min(distance,comparison_dist);}}distance=powf(powf(distance,8)+powf(position.z_,8),.125)-.5;hitType=HIT_LETTER;Vector3plank_test_pos(position);plank_test_pos.x_=fmodf(fabsf(plank_test_pos.x_),8.0f);floatroomDist=std::min(// min(A,B) = Union with Constructive solid geometry
//-min carves an empty space
-std::min(box_room.Test(position),// Lower room
box_roof.Test(position)// Upper room
),box_planks.Test(plank_test_pos)// Ceiling "planks" spaced 8 units apart.
);if(roomDist<distance)distance=roomDist,hitType=HIT_WALL;floatsun=19.9-position.y_;// Everything above 19.9 is light source.
if(sun<distance)distance=sun,hitType=HIT_SUN;returndistance;}// Perform signed sphere marching
// Returns hitType 0, 1, 2, or 3 and update hit position/normal
intRayMarching(Vector3origin,Vector3direction,Vector3&hitPos,Vector3&hitNorm){inthitType=HIT_NONE;intnoHitCount=0;floatd;// distance from closest object in world.
// Signed distance marching
for(floattotal_d=0;total_d<100;total_d+=d){hitPos=origin+direction*total_d;d=QueryDatabase(hitPos,hitType);// negative distance will mean we're inside the object we hit, I guess
// and we'll return right away so no worries there
if(d<.01||noHitCount>99){intunusedReturnRef=0;hitNorm=Vector3(QueryDatabase(hitPos+Vector3(.01,0,0),unusedReturnRef)-d,QueryDatabase(hitPos+Vector3(0,.01,0),unusedReturnRef)-d,QueryDatabase(hitPos+Vector3(0,0,.01),unusedReturnRef)-d).Normalized();returnhitType;}++noHitCount;}return0;}Vector3Trace(Vector3origin,Vector3direction){Vector3sampledPosition(1,1,1);Vector3normal(1,1,1);Vector3color(0,0,0);Vector3attenuation(1,1,1);Vector3lightDirection(light_direction);// Directional light
lightDirection.Normalize();for(intbounceCount=3;bounceCount--;){inthitType=RayMarching(origin,direction,sampledPosition,normal);if(hitType==HIT_NONE)break;// No hit. This is over, return color.
if(hitType==HIT_LETTER){// Specular bounce on a letter. No color acc.
direction=direction+normal*(normal.DotProduct(direction)*-2);origin=sampledPosition+direction*0.1;attenuation=attenuation*0.2;// Attenuation via distance traveled.
}if(hitType==HIT_WALL){// Wall hit uses color yellow?
floatincidence=normal.DotProduct(lightDirection);floatp=6.283185*randomVal();floatc=randomVal();floats=sqrtf(1-c);floatg=normal.z_<0?-1:1;floatu=-1/(g+normal.z_);floatv=normal.x_*normal.y_*u;direction=Vector3(v,g+normal.y_*normal.y_*u,-normal.y_)*(cosf(p)*s)+Vector3(1+g*normal.x_*normal.x_*u,g*v,-g*normal.x_)*(sinf(p)*s)+normal*sqrtf(c);origin=sampledPosition+direction*.1;attenuation=attenuation*0.2;if(incidence>0&&RayMarching(sampledPosition+normal*.1,lightDirection,sampledPosition,normal)==HIT_SUN)color=color+attenuation*Vector3(500,400,100)*incidence;}if(hitType==HIT_SUN){//
color=color+attenuation*Vector3(50,80,100);break;// Sun Color
}}returncolor;}
And here’s the relevant part of main() (once again largely unchanged from last post):
// int w = 960, h = 540, samplesCount = 8;
Vector3position(camera_position);Vector3goal=lookat_position-position;goal.Normalize();// this vector is actually to the right of goal... flipped signs of x and z for left.
// Up is down. Hence the subtractions instead of additions for trace directions
// Note to self: Yes, it was rendering upside-down, but only because originally it
// wrote values for y = h .. 0 and x = w .. 0, so from bottom right to top left, sequentially
Vector3left=Vector3(-goal.z_,0,goal.x_).Normalized()/w_;// Cross-product to get the up vector
Vector3up=goal.CrossProduct(left);// this used to be the argument to Trace
Vector3trace_dir{};for(intx=0;x<w_;x++){Vector3color;for(intp=samplesCount_;p--;){// this was the second Trace argument as both lines in one:
// !(goal + left * (x - w_ / 2 + randomVal()) + up * (y_ - h_ / 2 + randomVal()))
trace_dir=goal+left*(x-w_/2+randomVal())+up*(y_-h_/2+randomVal());trace_dir.Normalize();color=color+Trace(position,trace_dir);}// Reinhard tone mapping
color=color/samplesCount_+Vector3(1.0f,1.0f,1.0f)*14./241.0;Vector3o=color+Vector3(1.0,1.0,1.0);color=color/o;//[...]
}
As always, thank you for reading along so far. I started digging into this at the start of 2020, and now the year is almost over. I’ve had episodes where I’d work on these posts, but a lot of the time I’ve been putting it of… even though my lowest bar was to at least get all four planned posts out before the year ends.
In the meantime I also got sidetracked by implementing the pathtracer in CUDA and building supporting features around that to tinker with it further. That’s been great fun to see the whole thing running in real time and with camera controls and more, although the code is far messier than what I went for in this series!
Here’s a quick attempt at embedding a webm-video, hope that works out. It’s not very smooth especially while capturing with Peek. The GUI that didn’t want to cooperate with the low refresh rate is Nuklear which is a single header immediate-mode GUI that is otherwise pleasantly easy to deal with.
Stuttering about in real time on my GTX 1060. Sweet.
Maybe at some point I’ll figure out a more sustainable way of blogging about these things, where it comes more naturally alongside the tinkering. I might make that my goal for 2021.
If you have any corrections, constructive criticism or comments, please post them in the comments section below, or write to me via e-mail or Twitter! Feedback highly welcome. Stay safe out there.
~rf
And in theory these boxes or “planks” as I call them should repeat infinitely in either direction, actually! We just don’t notice since we’re all boxed in, and the space outside the room is just… all solid as far as our database function is concerned. (Although it should be trivial to, err… spatially restrict the effects of the modulo operation) ↩︎